Устройство для автоматического исследования нелинейных параметров ВТСП-керамики YBa2Cu3O7-x в переменных магнитных полях.
Аннотация
Дата поступления статьи: 18.06.2013Рассмотрены программная и аппаратная части разработанного и изготовленного устройства для автоматического исследования нелинейных параметров ВТСП-керамики YBa2Cu3O7-x в переменных магнитных полях. Приведены калибровочные и технические характеристики устройства. Новым является получения синхронных (погрешность в определении фазы не более 0.5 %) цифровых отсчетов сигнала отклика нелинейного образца и отсчетов сгенерированного внешнего магнитного поля (погрешность не более 1 %) с количеством выборки данных на канал до 90∙106 12-битных отсчетов и частотой дискретизации 600∙103 выборок в секунду. Диапазон задания переменных магнитных полей 1 – 50 Ое, частотный диапазон 1 – 50 кГц с шагом 1 Гц и точность задания 0.0291 Гц. Устройство имеет сопряжение с компьютером с помощью двух USB-интерфейсов и оригинальное программное обеспечение для работы с ним. С применением устройства проведена серия экспериментов по получению некоторых нелинейных параметров изготовленных цилиндрических образцов ВТСП-керамики YBa2Cu3O7-x. Проведен анализ полученных результатов и их сравнение с представленными в литературе
Ключевые слова: Нелинейная среда, ВТСП-керамика, синхронные отсчеты, высшие гармоники, процессор ARM-9, дифференциальный датчик.
05.11.17 - Приборы, системы и изделия медицинского назначения
Введение
Исследование электродинамики высокотемпературных сверхпроводников связано с изучением нелинейных электрических и магнитных свойств. Актуальность данной тематики обусловлена перспективностью применения высокотемпературных сверхпроводников в радиоэлектронике. Согласно информационному бюллетеню «Перспективные технологии: Сверхпроводники» [1] на данный момент уже реализованы такие сверхпроводниковые разработоки как: сверхпроводящий ограничитель аварийных токов (ИСФТТ РНЦ Курчатовский институт), магнитный СКВИД-микроскоп (МГУ), дисковая синхронная машина (ФГУП НИИЭлектронмаш), сверхпроводниковый турбогенератор (ФГУП НИИЭлектронмаш), серия ВТСП моторов (МАИ) и др.
Работы по данной тематике за последние несколько лет опубликованы как в отечественной, так и зарубежной литературе [2-15]. В [4] найдено приближенное аналитическое решение интегрального уравнения, описывающего распространение экранирующего критического тока. Численно смоделирован процесс проникновения магнитного поля в цилиндр конечной длины или диск жесткого сверхпроводника второго рода, находящегося в критическом состоянии в рамках модели Бина с учетом искривления силовых линий магнитного поля. В работах [5-7] для исследования нелинейных свойств ВТСП разработан и применен модуляционный Фурье-анализ и проведено экспериментальное исследование данным методом нелинейных магнитных свойств и ВАХ поликристаллов и монокристаллов YBa2Cu3O7-x. Разработан метод восстановления функции отклика из ее соответствующих зависимостей амплитуд гармоник. Изучено поведение амплитуд гармоник намагниченности ВТСП в низкочастотном магнитном поле. На основе исследований магнитных свойств ВТСП поликристаллов YBa2Cu3O7-x разработан формирователь гармоник [6-8], обладающий широким спектром формируемых гармоник.
В работах [9-10] проведено экспериментальное изучение гальваномагнитных свойств гранулярных ВТСП – магнитосопротивления.
Особое место в изучении нелинейной электродинамики ВТСП занимает метод восстановления зависимости поверхностного импеданса от амплитуды переменного магнитного поля. В работе [11] для восстановления данной зависимости из интегральных уравнений применен метод регуляризации Тихонова, развитый в теории некорректных задач. В работах [3, 12-15] развита модель пиннинга и вязкого течения гипервихрей к описанию экспериментально наблюдаемых радиофизических характеристик ВТСП, экспериментально обнаружены немонотонные магнитно-полевые зависимости мнимой и вещественной составляющих поверхностного имеданса образцов ВТСП-керамики в переменном и постоянном магнитных полях.
Таким образом, можно выделить несколько подходов к теоретическому и экспериментальному описанию нелинейных магнитных и электрических свойств ВТСП: изучение и анализ гармоник намагниченности, изучение магнитосопротивления и изучение поверхностного импеданса. Несмотря на различие этих подходов у них можно выделить общие черты. Во всех экспериментах создается переменное, постоянное магнитное или электрическое поле (а также их суперпозиция) и регистрируется сигнал отклика ВТСП образца. Из этого следует, что первичными измеряемыми величинами во всех исследованиях являются амплитуды, частоты, сдвиги фаз переменных электрических или магнитных полей. Следовательно, становится актуальной разработка компактного и удобного прибора с применением современной элементной базы, увеличивающей точность, чувствительности и быстродействие измерений. Все это позволит получить новые измеряемые величины, которые не могли быть получены ранее из-за несовершенства электронных средств. Например, при проведении исследований ВТСП в переменных магнитных или электрических полях во всех экспериментальных исследованиях [5-8, 10, 13] фиксировались только амплитуды сигнала отклика мнимых и вещественных составляющих намагниченности, поверхностного импеданса или магнитосопротивления. Хотя интерес может представлять и мгновенные значения задающего сигнала и сигнала отклика. Разработке такого устройства и посвящена данная работа.
Описание аппаратной части устройства
При использовании современных цифровых и аналоговых систем формирования и обработки сигналов разработана и изготовлена структурная схема аппаратной части устройства, представленная на рисунке 1. Измерительный комплекс имеет четыре составные части:
1. Генераторный модуль ГМ – осуществляет генерацию и задание синусоидального напряжения. Имеет независимый канал связи с ПК через цифровой интерфейс передачи данных USB1. Это позволяет управлять частотой, амплитудой и фазой сигнала непосредственно с ПК при помощи оригинального специализированного программного обеспечения.
2. Датчик Д – в общем случае представляет из себя четырехполюсник (с измеряемым образцом) для бесконтактных измерений в переменных электрических/магнитных полях или контактных для измерения динамических вольт-амперных характеристик. В данной конструкции представляет собой дифференциальный датчик с тремя катушками: для задания переменного, постоянного полей и для генерации сигнала отклика.
3. ИТУН – источник тока, управляемый напряжением.
4. Измерительный модуль ИМ – осуществляет предварительное усиление и фильтрацию выходного сигнала датчика. По запуску внешнего прерывания производится синхронная оцифровка сигналов измерительной катушки и сигнала задающей катушки. Модуль имеет независимый канал связи с ПК через порт USB2. Оцифрованные сигналы поступают в ПК, где производится их дальнейший спектральный анализ.
Генераторный модуль изготовлен по принципу “материнской платы” – на одной плате размещаются управляющий контроллер с элементами питания и разъёмы для подключения идентичных плат генераторных модулей ГМ1 – ГМ3, модуль для задания постоянной составляющей (МПС) и плата четырехканального сумматора.

Рис. 1. Структурная схема аппаратной части устройства.
Каждый из трех генераторных модулей имеет одинаковую конструкцию и состоит из цифрового синтезатора частот, масштабирующего цифро-аналогового преобразователя (ЦАП) и операционных усилителей для схемы сдвига уровня. Три модуля необходимы для задания суперпозиции из трех гармонических сигналов. Плата МПС состоит из эталонного источника опорного напряжения и умножающего ЦАП для управления величиной постоянной составляющей.
Рассмотрим принцип работы ГМ1. Формирование тестового сигнала в генераторном блоке осуществляется на базе цифрового синтезатора частот AD9850 [16]. Применение данного синтезатора позволяет получать синусоидальный сигнал в диапазоне 1 Гц – 40 МГц с шагом 1 Гц и точностью 0.0291 Гц. Далее сигнал фильтруется с помощью ФНЧ Бесселя 4-го порядка, выполненного на базе сверхмалошумящих 1.1 нВ/√Гц операционных усилителей OPA211 [17], что снижает полосу пропускания до 200 кГц. Для управления амплитудой сигнала использован 12-разрядный умножающий ЦАП DAC7821 [17]. Задание постоянной составляющей производится аналогичным ЦАП с прецизионным источником опорного напряжения со сверхмалым уровнем шумов LM4040 [17]. Выходные сигналы ГМ1-ГМ3 и МПС поступают на четырехканальный сумматор на выходе которого генерируется сигнал, состоящий из суперпозиции трех различных синусоид и постоянной составляющей.
Для формирования в датчике переменного тока использован источник тока, управляемый напряжением (ИТУН), изготовленный на базе мощного высоковольтного операционного усилителя OPA549 [17] в стандартной схеме включения ИТУН с заземленной нагрузкой [18]. Аппаратная реализация генераторного модуля позволяет получать переменные токи до 2А с шагом 10 мА в частотном диапазоне 200 кГц с шагом 1 Гц и постоянный ток до 5А с шагом 10 мА.
Измерительный модуль состоит из двух одинаковых инструментальных предусилителей, двух ФНЧ на 300 кГц, двух схем смещения для добавления постоянной составляющей, двух независимых синхронных аналогово-цифровых преобразователей (АЦП), находящихся в одном корпусе, гальванической развязке и преобразователя USB-UART. Ядром управляющей системы является специализированный процессорный модуль SK-9G45-OEM [19]. Выбор данного процессора обусловлен тем, что современная экспериментальная физика предъявляет высокие требования к системам измерения и обработки сигналов от различных датчиков. Одними из самых важных требований являются высокая скорость аналогово-цифрового преобразования с занесением полученных отсчетов в огромный банк данных, что позволяет проводить качественный спектральный анализ. Применение, в качестве ядра управляющей системы, стандартных 8-ми битных контроллеров с RISC-архитектурой ограничивает данные требования и делает невозможным применение высокоэффективных методов цифровой обработки сигналов. Также из-за низкой частоты работы ядра процессора (до 24 МГц) представляет значительную сложность разработка портативных систем реального режима времени (on-line систем).
Основой процессорного модуля является микроконтроллер Atmel AT91SAM9G45 [19] с ядром ARM926 с частотой 400 МГц. Для данного процессорного модуля изготовлена специализированная материнская плата, предназначенная для подключения интерфейсов программирования и отладки к персональному компьютеру (ПК). Для передачи данных в ПК, также выведены необходимые интерфейсы SPI, UART и линии контроллера ввода вывода для устройств типа аналово-цифровых преобразователей (АЦП), цифро-аналоговых преобразователей (ЦАП), цифровых синтезаторов частот (DDS) и т.д.
Для оцифровки сигналов применен специализированный высокоскоростной АЦП AD7265 [16]. Данная микросхема имеет два независимых 6-ти канальных 12-ти битных АЦП последовательного приближения с общим сигналом тактирования и частотой дискретизации до 106 выборок в секунду. Взаимодействие АЦП и процессора ARM осуществляется по шине SPI. По запросу процессора АЦП передает слово данных, содержащее 12 бит отсчетов одного из каналов АЦП1 и 12 бит отсчетов из канала АЦП2. Так как АЦП тактируются общим сигналом, то получение отсчетов происходит в синхронном режиме. Предварительно осуществляется предусиление и фильтрация сигналов S1(t ) и S2(t).
Входные сигналы поступают на соответствующие схемы смещения в соответствии с допустимыми уровнями оцифровки двух АЦП. При этом входные сигналы предварительно усиливаются с помощью инструментальных предусилителей и фильтруются с помощью фильтра Бесселя второго порядка с частотой среза 300 кГц. Это необходимо для фильтрации высокочастотных помех, присутствующих в выходном сигнале датчика. Отсчеты сигналов, после преобразования АЦП поступают во внутреннюю память процессорного модуля и далее в ПК, где производится их дальнейший спектральный анализ.
Инструментальные предусилители реализованы на основе прецизионных микросхем с уровнем шумов 8 нВ/√Гц OPA128 [17]. В ФНЧ и схемах смещения используются сверхмалошумящие 1.1 нВ/√Гц операционные усилители OPA211 [17].
Модуль поддерживает канал связи с ПК через USB2 реализованного на основе микросхемы моста USB-UART СP2102 [16]. Канал связи имеет гальваническую развязку, всего комплекса и ПК, реализованную на микросхеме на основе монолитных трансформаторов без сердечников ADuM1301 [17]. Это позволяет избавиться от шумов цепей питания ПК и защитить от короткого замыкания средства измерения.
Для уменьшения уровня шумов измерительных частей комплекса произведено разделение аналоговых и цифровых общих линий. На входе системы питания установлены электролитические конденсаторы и последовательно включены ферритовые бусины. В наиболее чувствительных аналоговых частях схемы в непосредственной близости от операционных усилителей по положительному и отрицательному питанию установлены LC – фильтры, состоящие из ферритового кольца с несколькими витками проволоки и керамического конденсатора. Печатные платы выполнены на двухстороннем фольгированном стеклотекстолите. Лужение плат производилось с помощью сплава Розе, после чего платы покрывались специальным защитным лаком “Plastic” для того, чтобы не происходило окисления залуженной поверхности, а также чтобы уменьшить эффект токов утечки и предотвратить пробой статическим электричеством.
Генераторный и измерительный модули размещены в металлических корпусах. Особое внимание уделено топологии цепей питания, общих точек и защитного зануления корпусов модулей. На рисунке 2 представлена данная схема. Питание генераторного модуля осуществляется с помощью аккумуляторного блока АБ1 и состоит из напряжений ±5 В. Общая точка АБ1 толстой жилой медного провода сечением 3 мм непосредственно запаяна на плату ГМ. Аналоговая часть измерительного модуля подключена к АБ2 и также имеет питание ±5 В. Цифровая часть ИМ питается от АБ3 напряжением +5 В. Аналоговые и цифровые общие линии ИМ разделены диодами Шоттки. Общие точки E и F, H и G также соединены медной жилой сечением 3 мм. В АБ1 используется два аккумулятора на 7 В и 1.35 Аh. АБ2 состоит из двух аккумуляторов по 6 В, 1.3 Аh. Аккумулятор АБ3 для питания цифровой части ИМ – 7 В, 1.35 Аh.
Рис. 2. Топология шин питания и общих точек аппаратной части устройства.
Мощный ИТУН питается от импульсного блока питания ИБП ±30 В 10А. ИБП подключен к сети 220 В. ИБП и ИТУН соединяются точками D и А. Общий провод всех частей комплекса имеет топологию звезда и сходится в точке А. Эта точка расположена на плате ИТУН и имеет следующую топологию: A-C-B, A-D, A-F-E и A-G-H. Корпуса ГМ и ИМ имеют защитное зануление. Питание АБ4 компьютера типа LAPTOP гальванически развязано от всех остальных модулей и имеет свои общие точки L1-L2. Данные меры позволяют значительно снизить уровень собственных шумов устройства.
Описание программной части устройства
Структурная схема программной части представлена на рисунке 3. Программную часть устройства можно подразделить на две составляющих:
- Управление ГМ и ИМ аппаратной части;
- Интерфейсные программы ПК по получению обработке данных.
Взаимодействие программ управления ГМ и ИМ и интерфейсной программы ПК осуществляется с помощью двух независимых интерфейсов USB1 и USB2.
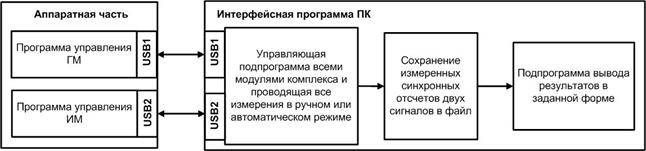
Рис. 3. Структурная схема программной части устройства.
Программа управления ГМ написана в среде разработки Code Vision AVR v2. После подачи питания программа переходит в режим ожидания приема данных от интерфейсной программы ПК с помощью интерфейса USB1. В программе производится задание амплитуды, частоты и фазы ГМ1-ГМ3, т.е. производит управление соответствующими DDS и ЦАП. Также, в программе производится управление ЦАП МПС.
Рассмотрим принцип работы программы управления ИМ. После подачи питания стартует загрузчик первого уровня Bootstrap. Используется оригинальный AT91 Bootstrap фирмы Atmel [19]. Его задачей является проведение начальной инициализации процессора, настройка управления памятью, копирование блока данных из указанного места энергонезависимой памяти в ОЗУ. Bootstrap также производит необходимую настройку интерфейса процессора: PLL, частота, шина SPI и параметры доступа к NAND FLASH. Далее происходит передача управления по определенному адресу ОЗУ. В качестве этой программы используется загрузчик второго уровня U-Boot, предоставляемый в свободном доступе с открытым кодом фирмой DENX Software Engineering [20]. Данный загрузчик производит монтирование корневой файловой системы, которая хранится в NAND FLASH и загружает ОС Linux в стандартном использовании процессорного модуля. Однако в нашем применении необходимо загружать не ОС Linux, а собственное приложение, так называемое, standalone приложение. Это связано с тем, что невозможно получать непрерывный поток эквидистантных отсчетов АЦП из-за низкого приоритета SPI интерфейса в операционной системе.
Загрузчик второго уровня U-Boot разработан специально для загрузки операционной системы Linux или других открытых операционных систем, таких как Android и т.д. После того, как данный загрузчик включается в работу платы, он начинает искать исполняемые файлы загрузки операционной системы (ОС). Если операционной системы не обнаружено, то по истечении 16 секунд процессорный модуль перезагружается и цикл повторяется вновь. Таким образом, становится невозможным запуск собственного приложения standalone. Для решения этой задачи было решено модифицировать стандартный загрузчик U-Boot и адаптировать его для загрузки не ОС Linux, а собственного standalone приложения. Исходные коды загрузчика были получены с сайта производителя DENX Software Engineering [20]. Затем произведена модификация программного кода в соответствии с требуемыми условиями. Генерация конечного файла U-boot для загрузки на плату достигалась средствами Linux. Использовалась виртуальная машина VMware c установленной ОС Linux Debian, в состав которой входят все исходные тексты, компилятор и утилиты для сборки, скрипты. Дополнительно был установлен открытый кросс-компилятор Code-Sourcery фирмы Mentor Graphics. Кросс компилятор необходим для компиляции кода программы, разработанной в одной операционной системы, которая будет работать на другой.
После применения данных средств был получен модифицированный загрузчик второго уровня, который, после подачи питания, копирует собственное приложение standalone из ПЗУ NAND FLASH в ОЗУ и после этого запускает его в автоматическом режиме.
Рассмотрим алгоритм работы standalone приложения, реализующего получение отсчетов быстродействующего АЦП. Программа написана в среде разработки IAR Embedded Workbench IDE фирмы IAR Systems на языке С. Первоначально производится подключение библиотек, необходимых для работы процессора. Далее производится инициализация системного контроллера, отвечающего за тактирование ядра процессора – 400 МГц, тактирование периферии – линий ввода/вывода, интерфейса UART, USB и т.д. После этого запускается последовательный интерфейс SPI получения данных с АЦП: 24 бит данных. Отсчеты последовательно заполняют ОЗУ процессора DDR2 256 MB. Это позволяет хранить до 89478485 12-битных отсчетов. После заполнения памяти, процессор последовательно выгружает данные в персональный компьютер. На разработанную программу получено свидетельство о государственно регистрации программы для ЭВМ [21].
Управляющая интерфейсная программа ПК написана в среде разработки Embarcadero RAD Studio Builder XE. С помощью программы осуществляется задание всех необходимых параметров аппаратной части, таких как, задание частоты дискретизации АЦП, установка параметров порта передачи данных. Интерфейсная программа взаимодействует с аппаратной частью посредством интерфейсов USB1 и USB2. Согласно методу цифрового синхронного детектирования [22] программа рассчитывает амплитуды и сдвиги фаз гармонических составляющих сигналов. Также программа выводит значения коэффициента нелинейных искажений и коэффициента гармонических искажений.
На основе этих данных производится окончательный вывод результатов в необходимой форме. Предусмотрено два режима измерений - анализ либо частотных зависимостей, либо амплитудных. В первом случае задается частотный диапазон исследования и значение амплитуды напряженности магнитного поля, во втором – диапазон изменения амплитуды магнитного поля при фиксированной частоте. Программа визуализирует как промежуточные результаты функционирования комплекса (зависимость мгновенных значений электрического поля E от напряженности магнитного поля H), так и полученные зависимости модуля поверхностного импеданса и сдвига фаз электрического и магнитного полей от амплитуды или частоты переменного магнитного поля. Подпрограмма оценивания параметров полигармонических сигналов имеет авторское свидетельство о государственной регистрации программы для ЭВМ [23].
Калибровочные характеристики устройства
Экспериментальная проверка работы аппаратно-программного комплекса проводилась для прямоугольного сигнала (меандра). На рисунке 4 представлены результаты сравнения спектрального состава меандра - как теоретического, так и полученного с помощью генераторного модуля. Как видно из графика, погрешность выше 1% возникает только для 15 гармоники, что может быть связано с неидеальностью синтезатора тестируемого сигнала. Уровень четных гармоник не превышает 10-4 В, что значительно ниже амплитуд нечетных гармоник меандра.
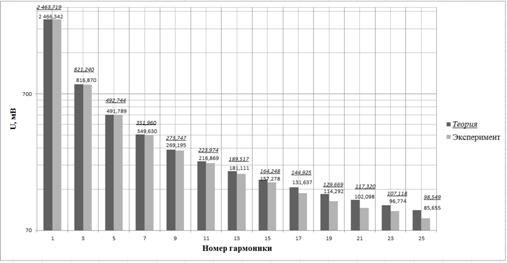
Рис. 4. Результаты экспериментального тестирования аппаратно-программного комплекса для меандра.
Калибровочные характеристики изготовленного устройства представлены в табл. 1.
Табл. 1.
Технические характеристики
Параметр |
Значение |
|
Диапазон задания переменных магнитных полей |
1 – 50 Oe |
|
Частотный диапазон |
1 – 50 кГц с шагом 1 Гц |
|
Точность задания частоты |
0.0291 Гц |
|
Количество синхронных каналов АЦП |
2 |
|
Регулируемый коэффициент усиления |
да |
|
Максимальная частота дискретизации |
до 1MSMP |
|
Рабочая частота дискретизации |
до 600 KSMP |
|
Объем выборки данных на канал |
256 MB |
|
Сопряжение с ПК |
Два интерфейса USB с гальванической развязкой |
|
Специализированное программное обеспечение для работы с измерителем |
да |
|
Погрешность измерений напряженностей магнитного и электрического поля |
не более 1% |
|
Погрешность в определении фазы |
не более 0.5% |
Образцы ВТСП керамики
Образцы высокотемпературной керамики YBa2Cu3O6,89 были получены с помощью метода двухстадийного твердофазного синтеза [24]. Отличительной особенностью от классической керамической методики является то, что обжиг производится в бескислородной среде. Это является существенным достоинством данной технологии, так как применение кислородной газовой среды при обжигах при высоких (»950 °С) сопряжено с возможностью возникновения пожара или взрыва.
С помощью разработанного и реализованного авторами ранее аппаратно-программного комплекса по автоматизации процесса изготовления высокотемпературных сверхпроводников [25] были получены 10 цилиндрических образцов длиной 30 мм и диаметром 12 мм. Синтезированные сверхпроводники обнаруживали эффект Мейсснера-Оксенфельда.
В [24] произведена оценка содержания кислорода в синтезированном по данной технологии сверхпроводнике. Измерение температурной зависимости коэффициента термо-ЭДС показало содержание кислорода 6,87-6,92 при максимальном значении 7. В той же работе проведено измерение температурной зависимости удельного электрического сопротивления образцов, что показало, что синтезированный материал обладает сверхпроводимостью при T < Tc » 91 К. Ширина сверхпроводящего перехода составляет ∆T » 2 К.
Методика и техника проведения эксперимента
В основу проведения эксперимента положен четырехзажимный взаимоидукционный метод [26]. Схема установки представлена на рисунке 5. В рамках метода в катушке 1 создается переменное магнитное поле h=hm×cos(ωt). Для этого через данную катушку пропускаетсяток, получаемый из источника тока, управляемого напряжением (ИТУН). Частота, амплитуда и начальная фаза задаются с помощью специализированной оригинальной программы ПК и через интерфейс USB1 передаются в генераторный модуль (ГМ). В катушке 2 создается постоянное магнитное поле H0 с помощью источника постоянного тока (ИПТ). Алгоритм задания постоянного поля аналогичен заданию переменного.
Катушки 1 и 2 намотаны на фторопластовый цилиндрический сердечник диаметром 20 мм. Катушка для задания переменного магнитного поля 1 имеет длину 150 мм и намотана медным проводом диаметром 1 мм в лаковой изоляции виток к витку. Катушка 2 имеет длину 150 мм и намотана медным проводом 0.5 мм в лаковой изоляции также виток к витку. Намотка обеих катушек осуществлена таким образом, чтобы снизить влияние паразитной емкости, а следовательно, чтобы улучшить их частотные параметры.
Таким образом, в центре катушек 1 и 2 создается суперпозиция практически однородных переменного и постоянного магнитных полей: H= hm×cos(ωt)+H0. Именно в эту область помещается дифференциальный датчик 4.
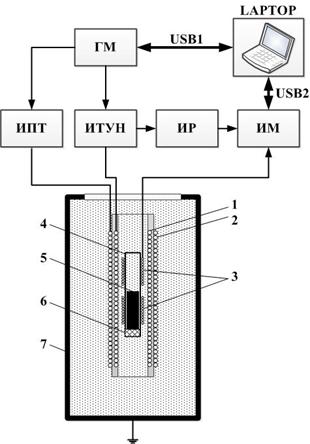
Рис. 5. Схема проведения эксперимента.
Катушка 3 разделена на две идентичные по параметрам секции (измерительную и компенсационную), имеющие встречное включение. Каждая из секций намотана на цилиндрический стеклянный каркас 4. Обе секции намотаны медным проводом диаметром 0.04 мм, длиной 15 мм. Каждая секция имеет по 375 витков. Для корректной работы дифференциального датчика, необходимо, чтобы число витков обоих секций было одинаковым. Однако, это параметр достаточно сложно контролировать из-за малого диаметра проволоки. Поэтому подбор числа витков секций катушек осуществлялся сначала по их длине, а затем по сопротивлению, измеренному эталонным омметром В7-40.
Расстояние между секциями измерительной катушки подобрано таким образом, чтобы исключить взаимное влияние секций. Для исключения влияния граничных эффектов на торцах исследуемого образца длины катушек в три раза меньше длины образца. Для улучшения соотношения сигнал/шум с дифференциальной катушки датчика предварительное усиление выполнено максимально близко от источника – непосредственно на каркасе датчика.
Образец 5 помещается только в измерительную секцию. Таким образом, в катушке 3 наводится переменное напряжение U34 = U3–U4 = A34×cos(ω0t+φ34), где U3,U4 значения переменных напряжений наводимых в секциях катушки 3:
![]() ,
, ![]() , (1)
, (1)
где ![]() – магнитная постоянная, R3– радиус катушки, S3 – площадь сечения катушки, N3 – число витков в одной из секций катушки L3L4.
– магнитная постоянная, R3– радиус катушки, S3 – площадь сечения катушки, N3 – число витков в одной из секций катушки L3L4.
Учитывая (1), получаем, что электрическое поле, наводимое в образце, будет определяться:
![]() , (2)
, (2)
Отношение комплексных амплитуд напряженности гармоник электрического поля на поверхности образца к амплитуде напряженности заданного магнитного поля называется поверхностным импедансом:
![]() , (3)
, (3)
При установке образца 5 ВТСП керамики YBa2Cu3O7-x с нелинейной магнитной восприимчивостью в измерительной секции катушки 3 наводится сигнал сложной формы, содержащий также и высшие гармоники тестового сигнала. ЭДС компенсационной секции катушки 3 содержит только первую гармонику. Так как катушки соединены дифференциально, то в выходном сигнале вклад высших гармоник, несущих информацию об изучаемом материале, будет значительно заметнее.
Вся система помещается в сосуд Дьюара, наполненным жидким азотом. Сам сосуд Дьюара для минимизации влияния внешних паразитных электромагнитных полей имеет защитное зануление.
Выход ИТУН последовательно включен с эталонным измерительным резистором ИР. Сигнал этого резистора пропорционален переменному магнитному полю, создаваемому в катушке 1. Резистор представляет из себя безындуктивное исполнение, что позволяет избавиться от паразитного сдвига фаз первой и высших гармоник. Сигнал с дифференциального датчика 3 вместе с сигналом эталонного ИР одновременно поступает на измерительный модуль ИМ. Где происходит синхронная оцифровка этих сигналов, занесение отсчетов в память и передача в ПК (LAPTOP) через интерфейс USB2.
Результаты
Исходя из свойств аппаратной и программной частей устройства, позволяющей синхронно оцифровывать задающий гармонический сигнал переменного внешнего магнитного поля h(t), в отсутствии постоянного, и сигнал отклика U(t) сверхпроводящего образца, проведен цикл измерений. Для каждого из 16 значений частот в диапазоне от 288 Гц до 1368 Гц с шагом в 72 Гц менялась амплитуда приложенного переменного магнитного поля hm в диапазоне от 5 до 30 Oe с шагом в 2.5 Oe. Каждое из измерений состоит из 8∙103 отсчетов задающего внешнее магнитное поле сигнала и 8000 отсчетов сигнала отклика с частотой дискретизации 600∙103 отсчетов в секунду. Шаг по частоте выбирался таким образом, чтобы исключить влияние помехи промышленной частоты 50 Гц.
На рисунке 5 представлена зависимость динамики изменения формы зависимости мгновенных значений сигнала отклика U от приложенного переменного магнитного поля h для шести различных амплитуд hm. Параметр hm варьировался от 5 до 30 Oe. Видно, что в случае малых амплитуд hm меньших или порядка 5 Ое вклад высших гармоник в сигнал отклика минимален. При увеличении hmначинают проявляться высшие гармоники и при этом форма зависимости вырождается в кривую 2 - 6. Т.к. все эксперименты проведены в отсутствии постоянного поля H0, то в сигнале отклика присутствуют только нечетные гармоники. Определение мощности амплитуд четных гармоник, согласно методу цифрового синхронного детектирования, описанному выше, дает величину не превышающую 0.01 %.
На рисунке 6 показаны зависимости амплитуды первой гармоники U1 от амплитуды переменного магнитного поля hm для различных частот. Амплитуды первой гармоники в полях меньших hm< 10 Oe имеют больший рост. При дальнейшем увеличении амплитуды hm> 10 Ое амплитуда первой гармоники имеет практически линейным ростом. Схожее поведение первой гармоники наблюдается в заданном диапазоне частот. Данные результаты хорошо согласуются с работами [5-8], где приведена подобная зависимость на частоте 1 кГц для цилиндрического образца.
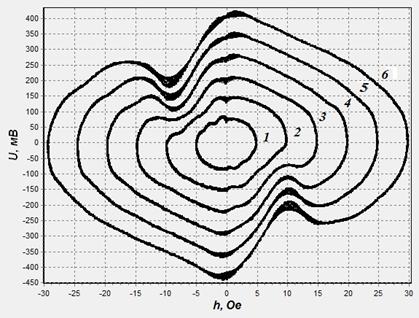
Рис. 6. Зависимость мгновенных значений сигнала отклика U(t) от мгновенных значений внешнего магнитного поля h(t) при различных амплитудахhm: 1 – hm=5 Oe, 2 – hm=10 Oe, 3 – hm=15 Oe, 4 – hm=20 Oe, 5 – hm=25 Oe, 6 – hm=30 Oe.

Рис. 7. Зависимость первой гармоники сигнала отклика U1от амплитуды внешнего магнитного поля hm для различных частот.
Зависимости амплитуд нечетных гармоник Un при n ≥ 3 от амплитуды переменного магнитного поля hm для фиксированной частоты f = 1368 Гц представлены на рисунке 7. Из-за большого количества гармоник, на рисунке представлены только первая 21 гармоника. Поведение гармоник с номерами n ≥ 3 имеет общую тенденцию увеличения. Причем, 7 и 9, 11 и 13, 15 и 17, 19 и 21 гармоники располагаются в непосредственной близости друг от друга. Третья гармоника при hmпорядка 24 Ое выходит на максимум и затем начинает уменьшаться. Пятая гармоника в полях меньших 14 Ое оказывается меньшей соответствующих значений третьей гармоники. В поле порядка 15 Ое значения третье и пятой гармоники равны. При дальнейшем увеличении поля, амплитуда пятой гармоники оказывается больше третьей. Данные результаты хорошо согласуются с работой [5-8], где считается, что величина сигнала отклика U(t) определяется изменением намагниченности исследуемого образца M. Следовательно, сигнал отклика U(t), полученный в данной работе, можно считать модулем намагниченного образца, а высшие гармоники – гармониками намагниченности.
Рис. 8. Зависимость амплитуд нечетных гармоник, начиная с третьей, сигнала отклика Un от амплитуды внешнего магнитного поля hm на частоте 1008 Гц.
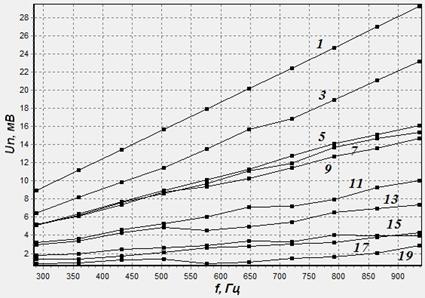
Рис. 9. Зависимость амплитуд нечетных гармоник, начиная с первой, сигнала отклика Un от частоты внешнего магнитного поля f. Первая гармоника уменьшена в 8 раз.
На рисунке 8 представлена частотная зависимость первой и высших нечетных гармоник от частоты в заданном диапазоне при амплитуде hm = 30 Ое. При этом, из-за больших значений амплитуд первой гармоники призведено их уменьшение в 8 раз. Наилучшей линейностью по частоте обладает первая гармоника. Более высшие гармоники также проявляют линейность. Все гармоники имеют схожее поведение во всем частотном диапазоне.
Заключение
В заключении отметим, что изготовленное устройство обладает существенными преимуществами по сравнению с аналогичными системами, как со стороны автоматизации измерений, так и со стороны технических характеристик (широкий диапазон задания амплитуд и частот переменных магнитных полей, частотный диапазон, точность задания частоты, синхронная оцифровка двух сигналов, сопряжение с компьютером и др.). Проведение эксперимента с применением аппаратно-программного комплекса позволило получить как зависимости, согласующие с другими работами, так и новую физическую информацию – оцифрованные синхронные мгновенные значения сигналов отклика ВТСП-керамики YBa2Cu3O7-x и задающее переменное магнитное поле.
Литература:
- Информационный бюллетень «Перспективные технологии: Сверхпроводники». Режим доступа: [http://perst.isssph.kiae.ru/].
- Enaki N., Colun S.// J Physics, 2012, v. 338, № 1, p.012006.
- Beek C.J., Marcilhac B., Lemaitre Y., Briatico J., Bernard R., Kermorvant J., Mage J., Villegas J. // J Applied Physics, 2009, v. 106, № 2, p.023912.
- Кузьмичев Н.Д., Федченко А.А. // ЖТФ. 2012. Т. 82. Вып. 5. С. 52–56.
- Славкин В.В., Тищенко Э.А. // ЖТФ. 2012. Т. 82. Вып. 10. С. 117–123.
- Головашкин А.И., Кузьмичев Н.Д., Славкин В.В. // ЖТФ. 2008. Т. 78. Вып. 1. С. 59–62.
- Головашкин А.И., Кузьмичев Н.Д., Славкин В.В. // ЖТФ. 2008. Т. 78. Вып. 10. С. 65–69.
- Головашкин А. И., Кузьмичев Н. Д., Славкин В. В.// Прикладная физика. 2005. № 5. С. 125.
- Сухарева Т.В., Финкель В.А. // ЖТФ. 2010. Т. 80. Вып. 1. С. 68–73.
- Сухарева Т.В., Финкель В.А. // ЖТФ. 2011. Т. 53. Вып. 5. С. 858–864.
- Трунин М.Р. // УФН. 1998. Т. 168. Вып. 9. С. 931–952.
- Гайкович К.П., Резник А.Н. // ЖТФ. 1998. Т. 68. Вып. 8. С. 78–86.
- Игнатьев В.К., Негинский И.В. // ПТЭ. 1998. Т. 2. С. 60.
- Игнатьев В.К., Негинский И.В. // ФНТ. 2000. Т. 26. . Вып. 4. С. 340–349.
- Черноморец М.П.,Ковальчук Д.Г., Рябченко С.М., Семенов А.В., Пашицкий Э.А. // ФНТ. 2006. Т. 32. . Вып. 8/9. С. 1096–1104.
- Информация с сайта производителя. Режим доступа: [http://www.analog.com].
- Информация с сайта производителя. Режим доступа: [http://www.ti.com].
- Пейтон А.Дж., Волш В. Аналоговая электроника на операционных усилителях. — М.: Бином, 1994. — 352 с.
- Информация с сайта производителя. Режим доступа: [http://www.atmel.com].
- Информация с электронного ресурса. Режим доступа: http://www.denx.de/wiki/U-Boot
- Глухов А.Ю., Арзуманян Г.А., Квочкин А.И. //Свидетельство о государственной регистрации программы для ЭВМ № 2012614991 Российская Федерация / Заявка № 2012614991; Зарегистрировано в реестре программ для ЭВМ: 04.06.2012.
- Creath K. Phase measurement interferometry techniques: Progress in Optics, 1988, V. 26, Chap. 5. p. 349-383.
- Глухов А.Ю., Арзуманян Г.А. // Свидетельство о государственной регистрации программы для ЭВМ № 2012618758 Российская Федерация / Заявка № 2012618758; Зарегистрировано в реестре программ для ЭВМ: 25.09.2012.
- Глухов А.Ю., Черныш А.В. // Патент на полезную модель № 126157, 2013 г.
- Ю.А. Полонский, С.А. Суворов, Н.Ю. Егоров // Материалы Всероссийского электротехнического конгресса ВЭЛК-2005, Москва. М.: МЭИ, 2005.-С. 186-188.
- Левшина Е. С., Новицкий П. В. Электрические измерения физических величин. — Л.: Энергоатомиздат, 1983. — 320 с.