Преобразование координат, используемых в геодезии
Аннотация
Предлагается решение актуальной проблемы преобразования координат из одной системы в другую. Приведены формулы связи прямоугольных и геодезических координат, различных пространственных прямоугольных координат и систем координат на плоскости.
Ключевые слова: Геодезия, Координаты, Преобразование
Геодезисты часто сталкиваются с проблемой преобразования координат из одной системы в другую. Часто используют локальные системы координат, переход от которых к государственной системе по тем или другим причинам выполнить трудно или практически невозможно. Поэтому проблема преобразования координат, особенно в настоящее время, когда используют современные спутниковые технологии, является актуальной.
Используемые в геодезии системы координат можно классифицировать по положению начала координат: геоцентрическая, с началом в центре масс Земли, квазицентрическая – с началом вблизи центра масс и топоцентрическая – с началом на поверхности Земли; по координатным линиям: пространственные прямоугольные X, Y, Z, плоские x, y, сферические φ, λ, Н – на шаре, эллипсоидальные или геодезические B, L, H - на L, Hллипсоидальные или геодезические атным линиямсифицировать по положению начала координат: геоцентрическая, с началом в це эллипсоиде. Для определения небесных объектов применяют звездные системы, для объектов на Земле – земные системы координат, которые жестко фиксируются в теле Земли и участвуют в ее суточном вращении [1].
Связь прямоугольных X, Y, Z и геодезических B, L, H координат выражается известными формулами
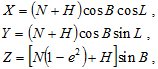
где радиус кривизны первого вертикала 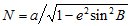 , a, е – большая полуось и эксцентриситет эллипсоида.
, a, е – большая полуось и эксцентриситет эллипсоида.
При использовании параметров a и е референц-эллипсоида получают референцную систему координат, при применении a и е общеземного эллипсоида – общеземную систему координат. Референцные и общеземные системы отличаются по положению начал X0 , Y0 , Z0 координат, повороту осей координат (обычно на малые углы) и разностью dm масштабов.
Положение координатной системы 1 относительно системы 2 можно характеризовать тремя углами Л.Эйлера: 1) угол нутации υ между положительными направлениями осей OZ1 и OZ2; 2) угол прецессии ψ между осью OX1 и линией пересечения ОА плоскостей X1OY1 и X2OY2, угол ψ отсчитывается от OX к OY; 3) угол чистого вращения φ – между ОА и ОХ2, направление отсчета от ОХ2 к OY2.
Проведя сферу единичного радиуса с центром в начале координат О, получим сферические треугольники (см. рис.1) X1 Y1 Z1 и X2 Y2 Z2. Для перехода от системы X1 Y1 Z1 к X2 Y2 Z2 систему X1 Y1 Z1 поворачивают вокруг Z1 на угол ψ, затем вокруг А на угол υ и вокруг Z2 на угол φ. Координаты X1, Y1, Z1 при известных значениях X2, Y2, Z2 определяют по формулам
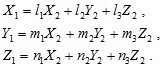
Координаты X2, Y2, Z2 при известных значениях X1, Y1, Z1 находят
Рис.1 по формулам
Рис.1

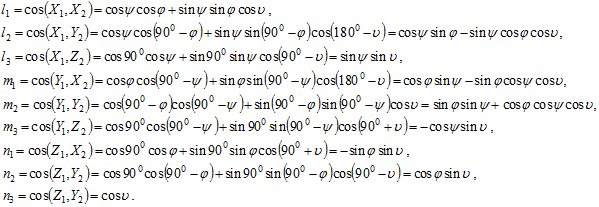
где l1, l2, l3; m1, m2, m3; n1, n2, n3 – направляющие косинусы, которые согласно рис. 1 определяют по формулам косинусов сферических треугольников:
При малых значениях угла υ и малом отличии углов ψ и φ (менее 1-2”) можно считать  . В этом случае направляющие косинусы
. В этом случае направляющие косинусы

Учитывая несовпадение начала координат 1 и 2 систем на вектор  , изменение масштаба и поворот систем на угол Эйлера, в векторной форме фундаментальное уравнение космической геодезии имеет вид:
, изменение масштаба и поворот систем на угол Эйлера, в векторной форме фундаментальное уравнение космической геодезии имеет вид:
 ,
,
где  - геоцентрический и топоцентрический радиус-векторы спутника,
- геоцентрический и топоцентрический радиус-векторы спутника,  - радиус-вектор, определяющий положение пункта наблюдения, матрица масштаба
- радиус-вектор, определяющий положение пункта наблюдения, матрица масштаба
 ,
,
где  - масштабы по осям геодезической системы. Матрица поворота
- масштабы по осям геодезической системы. Матрица поворота
 .
.
Часто возникает необходимость перехода от одной системы координат к другой на плоскости. В этом случае используют выражения
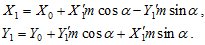
Принимая  , для двух точек в общих системах координат находим
, для двух точек в общих системах координат находим
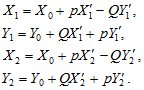
Вычитая из третьего уравнения первое, а из четвертого – второе, получаем

Решение этих уравнений приводит к
Значения

При избыточном числе точек задача решается по методу наименьших квадратов.
Литература
-
И.Ф.Куштин, В.И. Куштин. Геодезия: учебно-практическое пособие. – Ростов н/Д: Феникс, 2009. – 909с.